Siyuan Chen is currently working toward the Ph.D. degree in control science and engineering with the School of Automation Science and Engineering in SCUT. He were involved several projects as principle leader and pursued research works in the field of neural networks, intelligent robots, BCI and optimal control. He published 13 SCI papers and obtained 5 China autorized patents. He won many honors and awards including Ph.D. National Scholarship, President Scholarship of SCUT, and the 14th "Challenge Cup" Special prize.
(Google: Citation: 232; H-Index: 7; I10-Index: 6.)
Sep. 2017 - Jun. 2022: Combined Master-Doctor's Degree Program (2+3) in Control Science and Engineering.
South China University of Technology (SCUT), Supervisor: Prof. Zhijun Zhang & Co-Supervisor: Prof. Zhuliang Yu.
Sep. 2013 - Jun. 2017: Bachelor in Automation Science and Engineering.
South China University of Technology (SCUT).
Awards
2021, Professor Mao Zongyuan Scholarship, Professor MAO Zongyuan Scholarship Fund
2019, Ph.D. National Scholarship,Ministry of Education of the People's Republic of China
2019, President Scholarship,South China University of Technology
2017, Boeing Scholarship, Boeing Airlines Club
2016, The Chevron Technology Scholarship, The Chevron Scholarship Foundation
Services and Skills
Reviewer of IEEE Trans. Fuzzy Syst., IEEE Trans. Cogn. Dev. Syst., IEEE Access and Robot. Comput.-Integr. Manuf.
My research accomplishment to date mainly includes four topics: robotics, neural networks, BCI and UAV.
I. Intelligent Redundant Manipulators, Jan 2015 - Present
Principal Leader, Bionic Intelligent Robot (BIR) Lab | Advisor: Prof. Zhijun Zhang
Summary
Designed and developed novel optimal criteria and functional criteria to improve the adaptivity, robustness, safety and efficiency of redundant manipulator systems, and to fully utilize their flexibility.
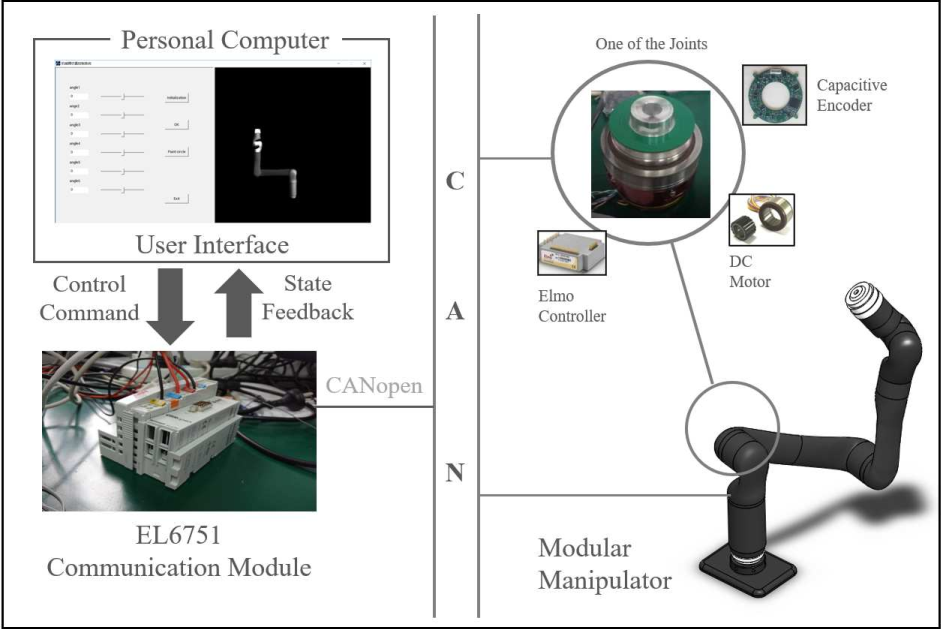
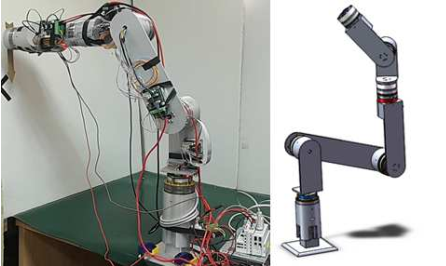
Designed and developed a redundant manipulator consisted of three large size modular-design joints and three small size modular-design joints, and controlled through CANopen, and including the development of mechanical design, user interfaces design, and so on. (entrusted by company)
Developed a effective optimal control algorithm for the dual robot system to operate the complex work with the cooperation of machine vision. (entrusted by Hitachi)
Published 9 SCI papers, obtained 6 authorized China invention patents, and obtained a grand prize of the 14th "Challenge Cup" competition in Guangdong.
I-A. Functional Criteria for Intelligent Redundant Manipulators
A serious functional criteria are designed to improve the intelligence of control systems of redundant manipulators. The design of functional criteria, generally considered as constrains in optimal schemes of redundant systems, thus become an important work to improve the adaptive capacity and performance of redundant manipulators by digging their potential in flexibility.
The adaptive projection criterion is designed to recognize model parameters by decoupling the Jacobian matrix of the robot.
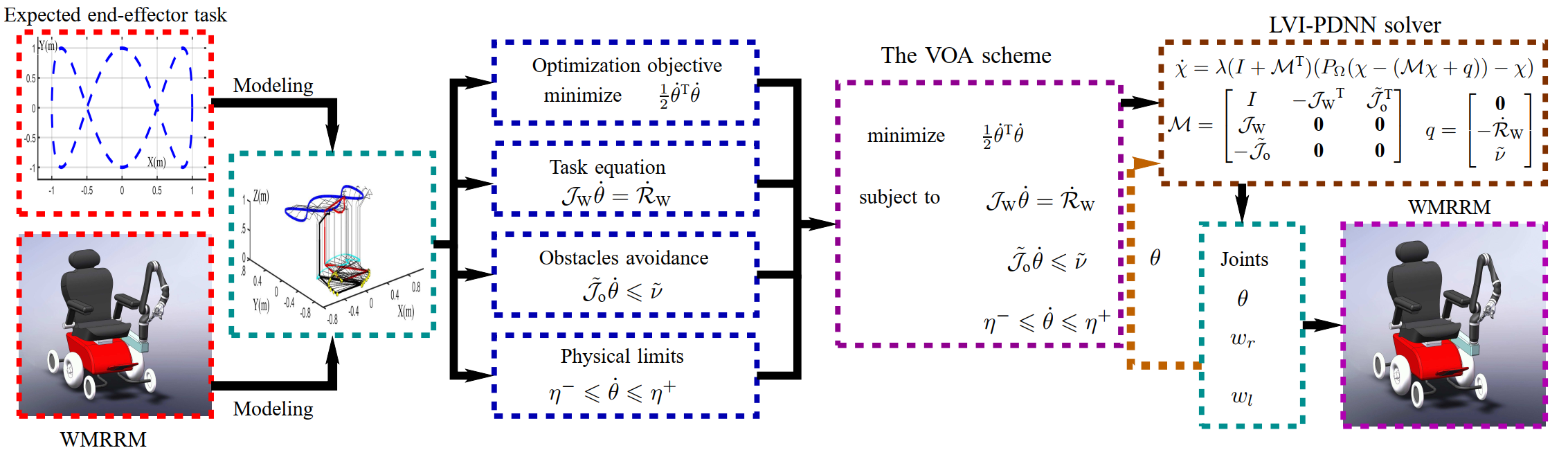
There are four novel functional criteria proposed for the redundant robots. By employing these criteria, the manipulator system is capable of simultaneously handling the main tracking task and other non-negligible cases such as parameter uncertainty, obstacle avoidance, end-effector posture sensitive, initial position error and error accumulation problem.
The proposed functional criteria are proofed rigorously and verified on PUMA 560, Kinova Jaco2 and mobile robots.
Two hybrid end-effector posture-maintaining and obstacle avoidance schemes are proposed and investigated for redundant robots.
I-B. Optimal criteria for Intelligent Redundant Manipulators
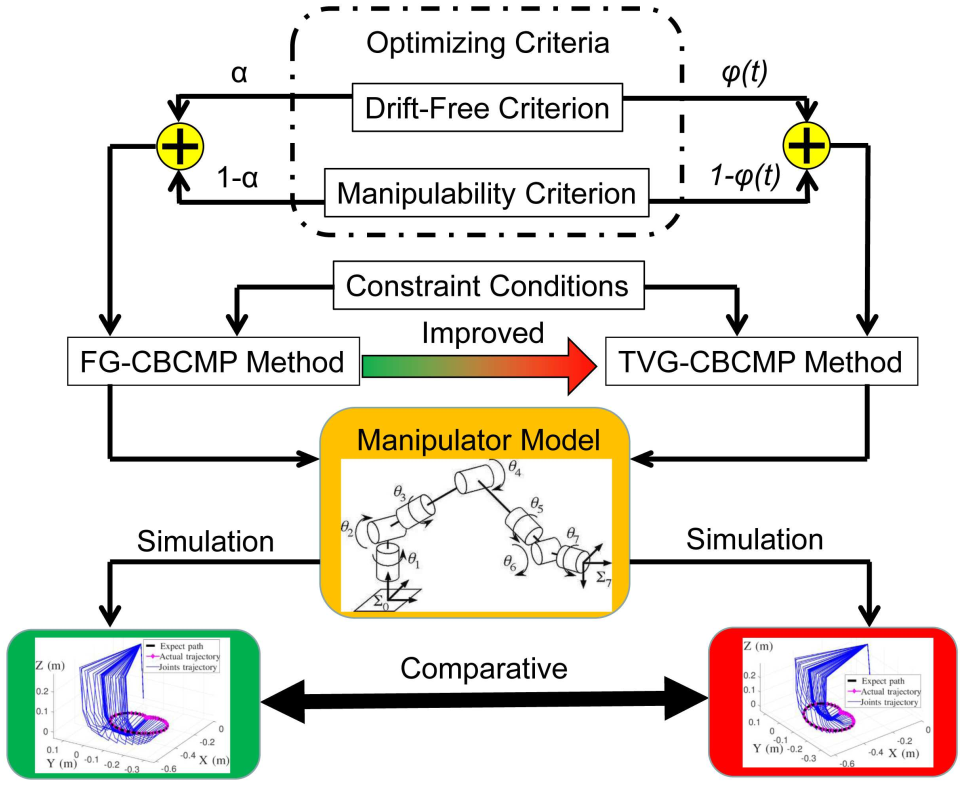
To improve the suitability of the redundant robot system in complex surroundings, it is significant to obtain the optimal solution among feasible solutions. Different novel optimal criteria are proposed for needs of redundant robot system with different tasks and surroundings. Besides, compound optimal criteria are designed to achieve trad-off solution for redundant robot systems.
Several compound optimal criteria combined by multi single criteria are proposed to remedy the position deviation of joint-angles at the velocity level and acceleration level. These compound criteria help the redundant robot system obtaining the trad-off solution from its feasible solution space.
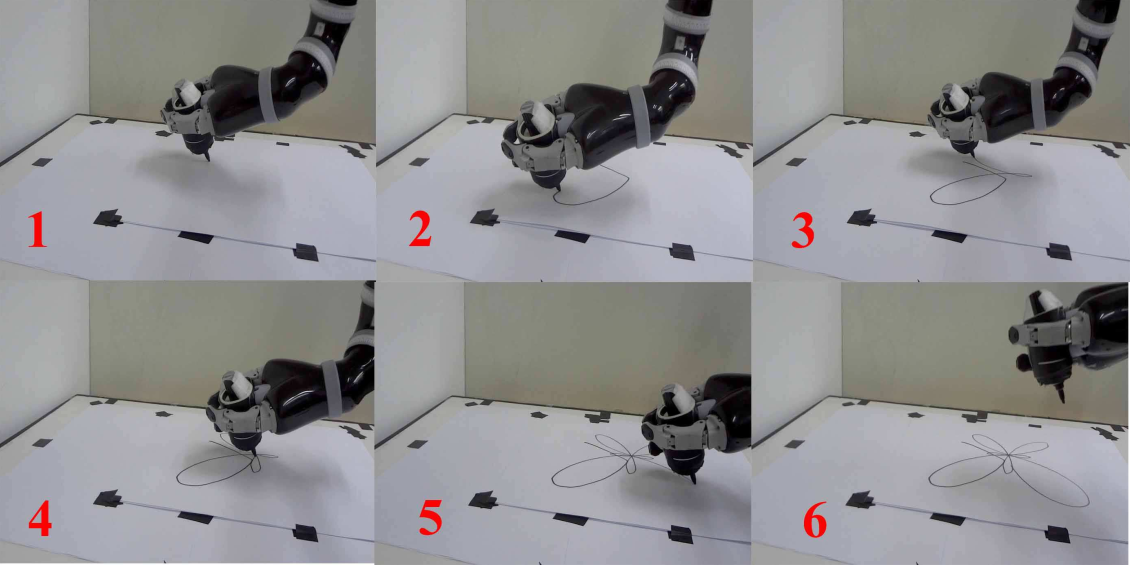
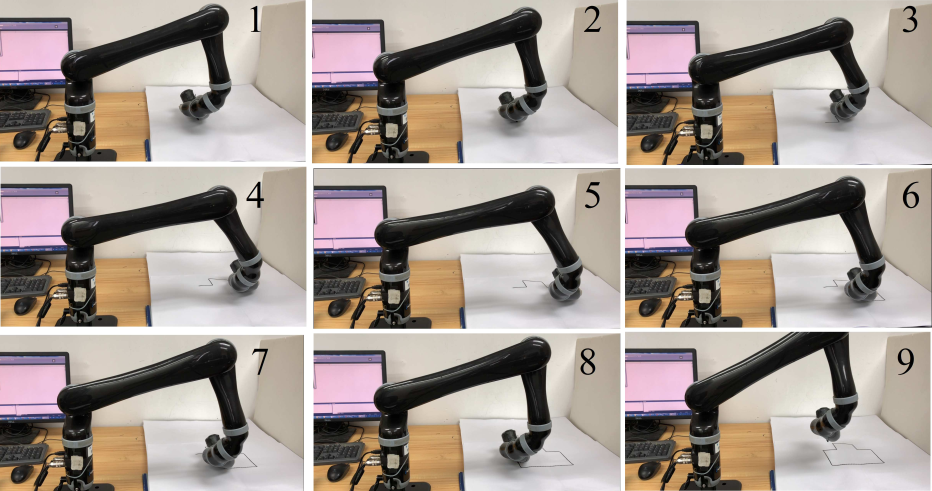
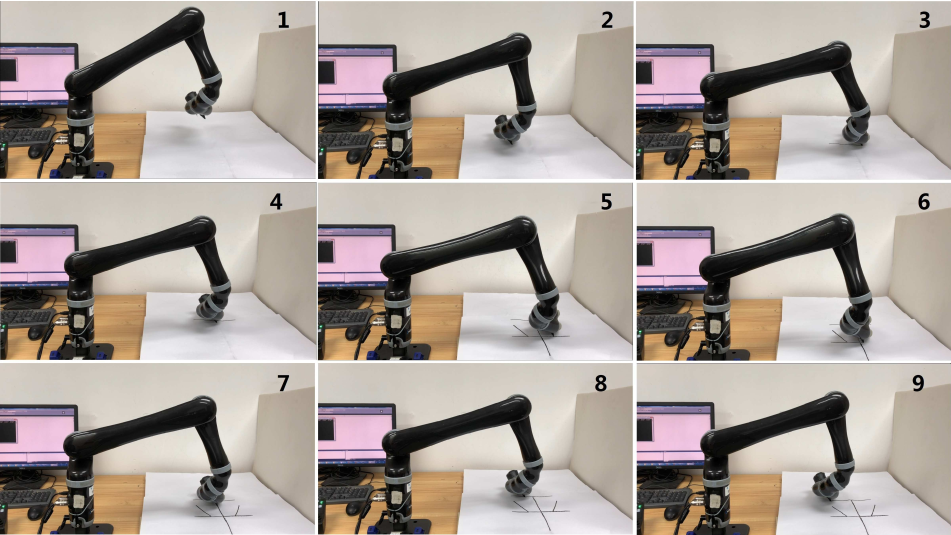
Time-varying adjusting approach is introduced into the design of optimal criteria, and therefore the performance of compound criteria is improved greatly due to the further plan on time dimension, especially the criterion mixed with repetitive motion criterion.
The availability of the proposed criteria are illustrated by sufficient simulations and experiments.
I-C. Designed and Developed a Redundant Manipulator with Six Joints
Entrusted by the company, a dismountable redundant manipulator was designed and developed, including the development of mechanical design, user interfaces design, programming, and control algorithms. Every joint can be controlled independently and consists of an aluminium alloy linkage and several devices attached on it, including a DC motor, a capacitive encoder and a controller. Through CANopen these six joints can receive control orders from computer by two approaches, i.e., inputting exact joint value or dragging the sliding block, and its posture will shown on the user interface at the same time.
Each modular joint is an independent mechanical and electrical system that can be reconstructed with different linkage mechanisms according to different requirements.
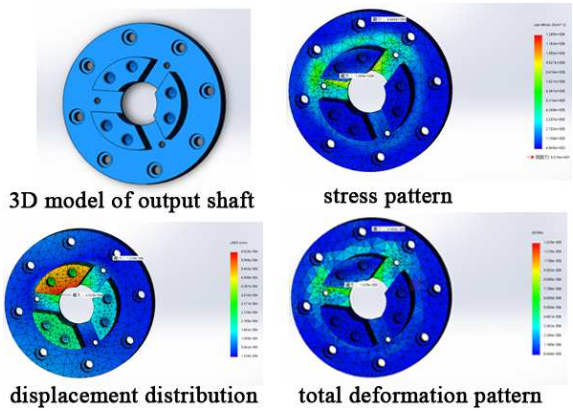
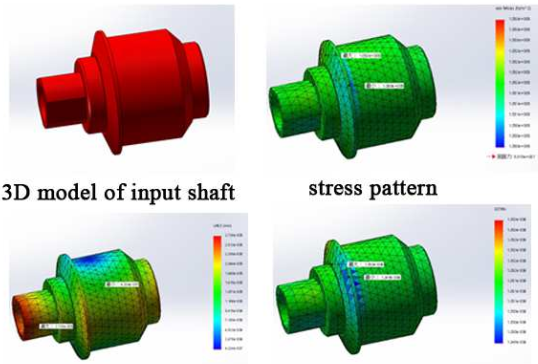
The non-standard parts of the joints of the manipulator and the connecting rod mechanism are made of lightweight aluminum alloy, which has the characteristics of lightweight.
A 3D simulation control system for the manipulator was developed for the convenience of controlling the manipulator easily and realize cooperative tasks.
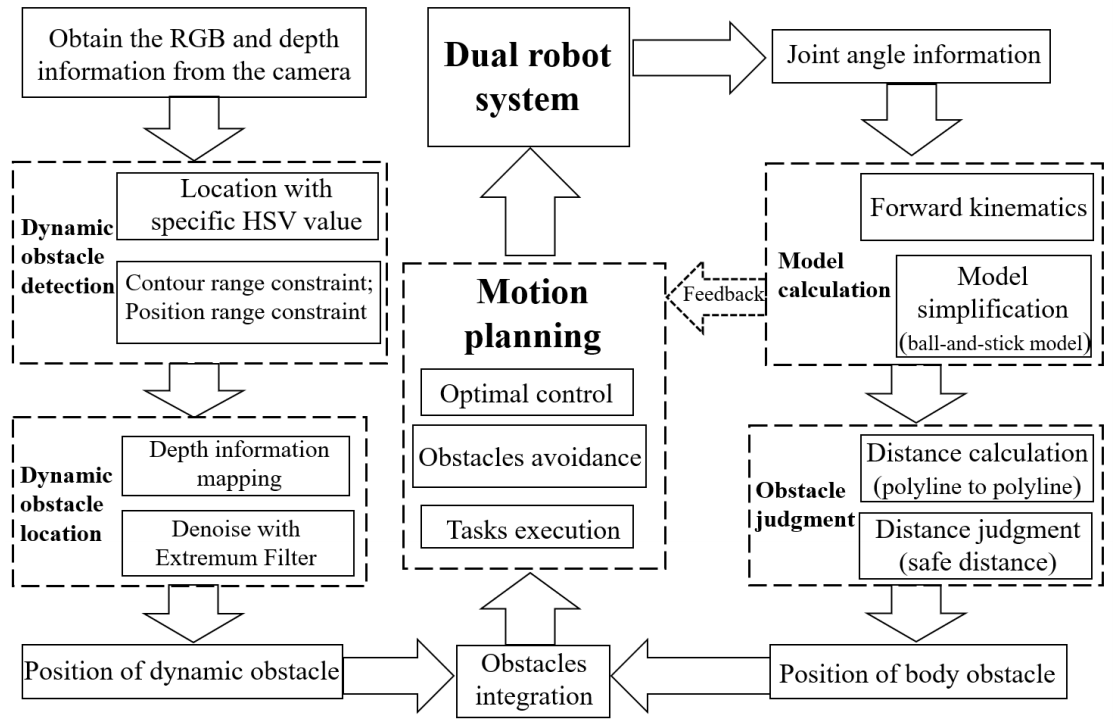
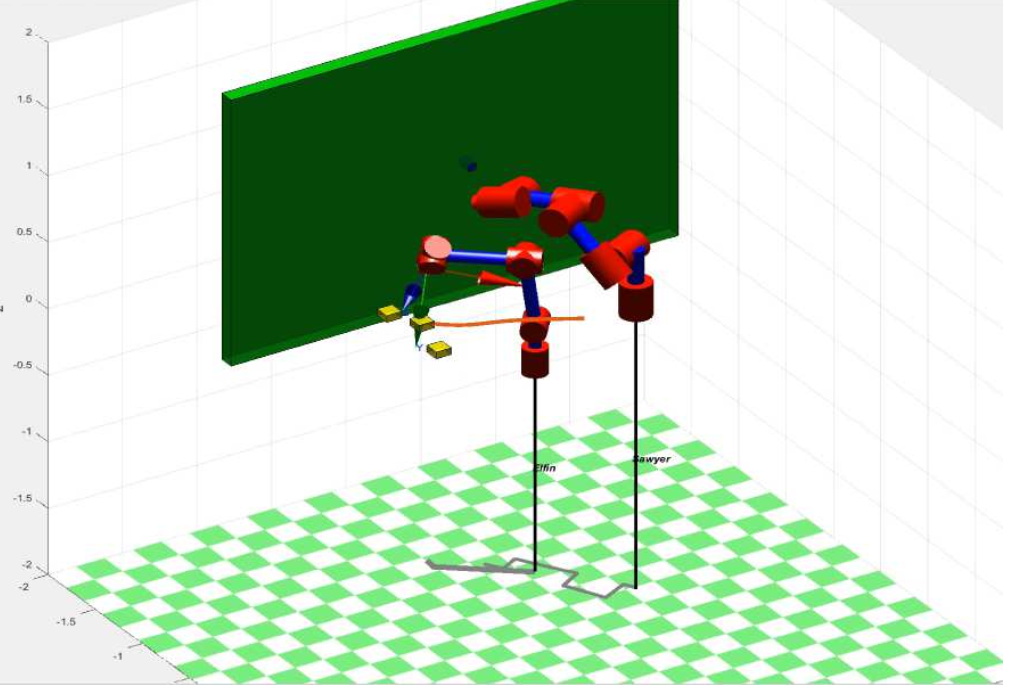
I-D. Developed an Effective Optimal Control Algorithm for the Dual Robot System
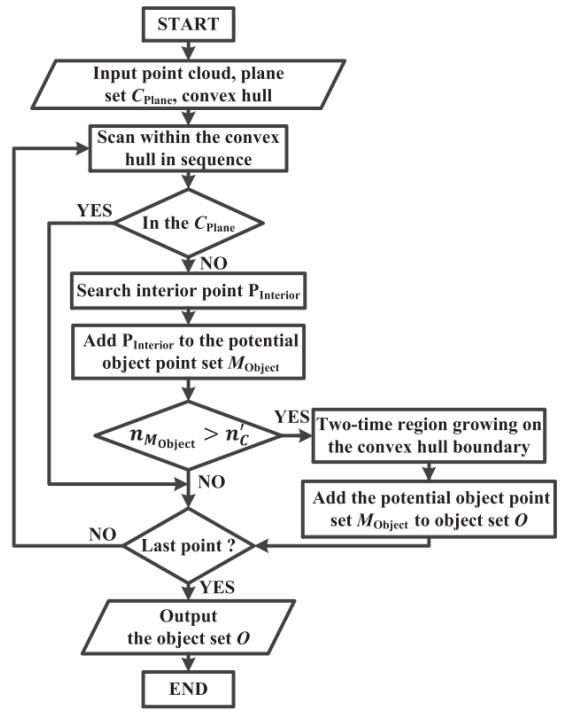
To drive the dual robot system with two redundant manipulators accomplishing the assembly work cooperatively, an effective optimal control algorithm was proposed and developed (Entrusted by Hitachi). Due to the confidentiality agreement, the too detail description cannot be given. The task requires the main robot arm avoiding some dynamic or static obstacles during working, and two manipulators are asked to finish a series of operations along the desired order. By detecting the obstacle in the 3D image obtained from a fixed camera, the redundant manipulator is able to change it posture in time.
The developed control algorithm is capable of driving the dual robot system for cooperative assembly work according to the process requirement.
Under the guidance of the developed control algorithm, the dual robot system changes its end-effector tool by itself according to the requirement of assembly work.
With the help of the camera, the developed control algorithm is able to drive the dual robot system to avoid the dynamic or static obstacle. It is worth noting that the robot itself is also considered as obstacle and its position is calculated through forward kinematics.
Publications
Y. Zhang, S. Chen, et. al., "Adaptive projection neural network for kinematic control of redundant manipulators with unknown physical parameters," IEEE Transactions on Industrial Electronics, 2018 (JCR:Q1, IF: 8.236) (PDF |
Google)
Z. Zhang (PI), S. Chen, et. al., "Compatible Convex-Nonconvex Constrained QP-Based Dual Neural Networks for Motion Planning of Redundant Robot Manipulators," IEEE Transactions on Control Systems Technology, 2019 (JCR:Q1, IF: 5.485) (PDF |
Google)
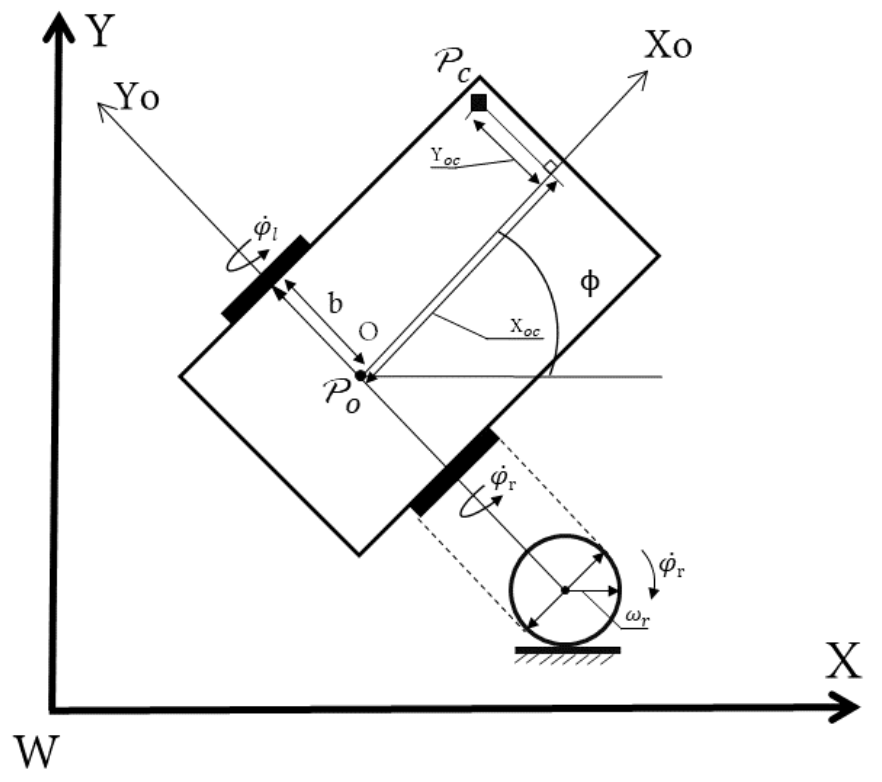
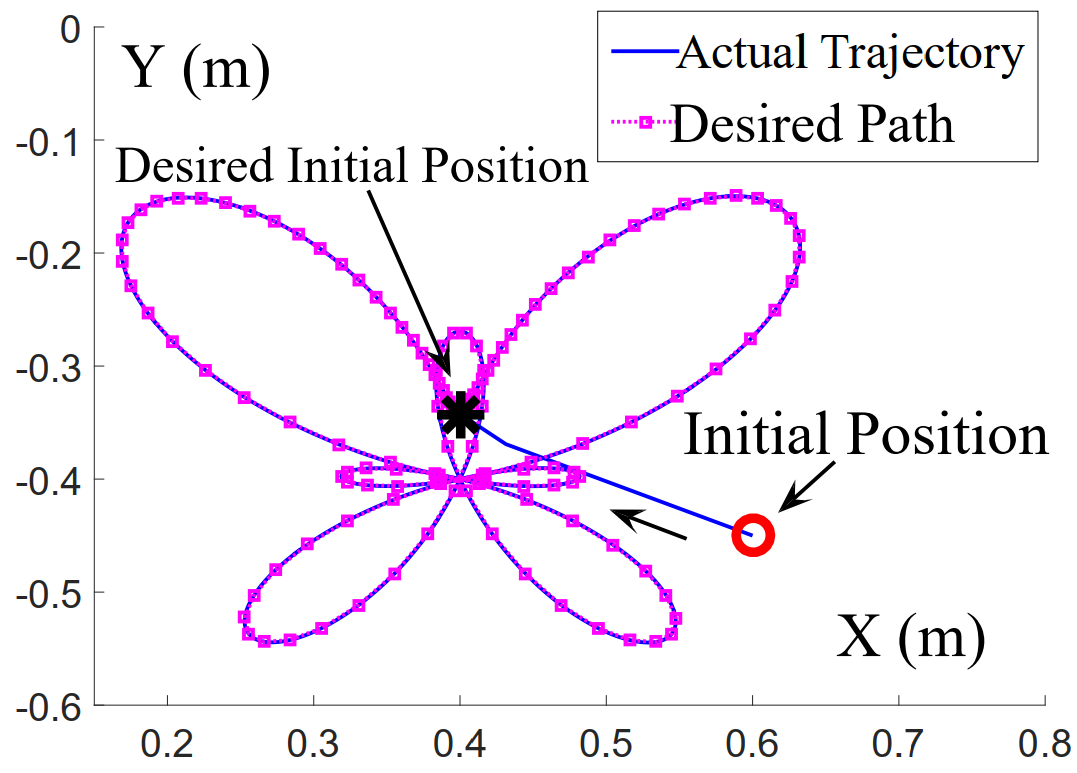
Z. Zhang (PI), S. Chen, et. al., "Two Hybrid Multiobjective Motion Planning Schemes Synthesized by Recurrent Neural Networks for Wheeled Mobile Robot Manipulators," IEEE Transactions on Systems, Man, And Cybernetics: Systems, 2021 (JCR:Q1, IF: 13.451) (PDF |
Google)
Z. Zhang (PI), S. Chen, et. al., "Two Hybrid End-Effector Posture-Maintaining and Obstacle-Limits Avoidance Schemes for Redundant Robot Manipulators," IEEE Transactions on Industrial Electronics, 2019 (JCR:Q1, IF: 10.215) (PDF |
Google)
Z. Zhang (PI), S. Yang, S. Chen, et. al., "A Vector-Based Constrained Obstacle Avoidance Scheme for Wheeled Mobile Redundant Robot Manipulator," IEEE Transactions on Cognitive and Developmental Systems, 2021 (JCR:Q2, IF: 3.379) (PDF |
Google)
Z. Jia, S. Chen, et. al., "Tri-Criteria Optimization Motion Planning at Acceleration-Level of Dual Redundant Manipulators," Robotica, 2020 (JCR: Q1, IF: 2.088) (PDF |
Google)
Z. Jia, S. Chen, et. al., "Velocity-Level Tri-Criteria Optimization Scheme for Different Complex Path Tracking of Redundant Manipulators," IEEE Access, 2019 (JCR:Q2, IF: 3.379) (PDF |
Google)
Z. Jia, X. Qu, S. Chen, et. al., "Acceleration-Level Multi-Criteria Optimization for Remedying Joint-Angle Drift of Redundant Manipulators on Complex Path Tracking," IEEE Access, 2019 (JCR:Q2, IF: 3.379) (PDF |
Google)
S. Chen and Z. Zhang, "Combined Bi-Criteria Motion Planning Method Synthesized by Varying-Gain Recurrent Neural Network for Redundant Manipulators," IEEE Transactions on Systems, Man and Cybernetics: Systems, (Under review, JCR:Q1, IF: 13.451)
Z. Zhang, J. Guo, S. Chen, et. al., "A Real-time 3D Visual Detection based Soft Wire Avoidance Scheme for Industrial Robot Manipulators," IEEE/ASME Transactions on Mechatronics, (Under review, JCR:Q1, IF: 5.303)
Z. Zhang (PI) and S. Chen, A Primal-dual Neural Network Method for Robot Motion Planning with Nonlinear Constraints(一种非线性约束的原对偶神经网络机器人动作规划方法),Invention Patent, Authorization Number: CN108015766B,
(Web)
Z. Zhang (PI) and S. Chen, An Extended Solution Set Dual Neural Network for Robot Motion Planning(一种机器人运动规划的拓展解集对偶神经网络解决方法),Invention Patent, Authorization Number: CN108015765B,
(Web)
HITACHI and SCUT, Flexible Line Location Detection Method, Device and Storage Medium(软线定位检测方法、装置及存储介质),Invention Patent, Application Number: CN202110863391.X. (Under review)
II. Neurodynamic Strategies for Time-varying Problems, Jan 2015 - Present
Principal Leader, Bionic Intelligent Robot (BIR) Lab | Advisor: Prof. Zhijun Zhang
Summary
Designed and proposed circadian rhythms neural network (CRNN) and discrete-time CRNN to press the periodic noise for time-varying optimal problems by inserting a compensation item into the recurrent neural network.
To deal with dynamic matrix inverse problems, a novel recurrent neural network with time-varying parameter is proposed based on neurodynamics.
By introducing the integral of function error, designed the modify zeroing neural network strategy for solving time-varying matrix inverse problems with great tolerance to noise and finite-time convergent characteristic.
Published 8 SCI papers, and obtained 3 authorized China invention patents.
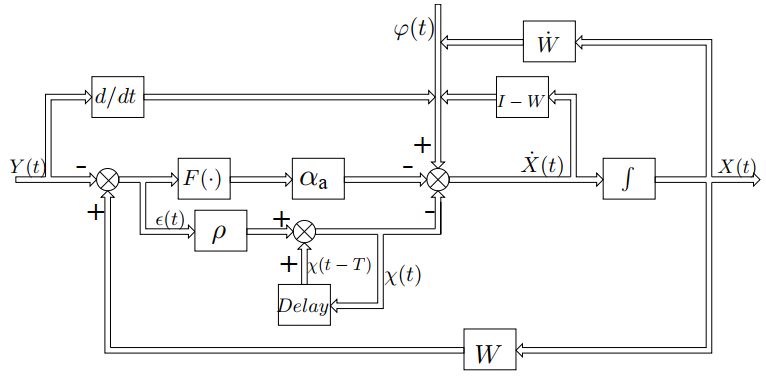
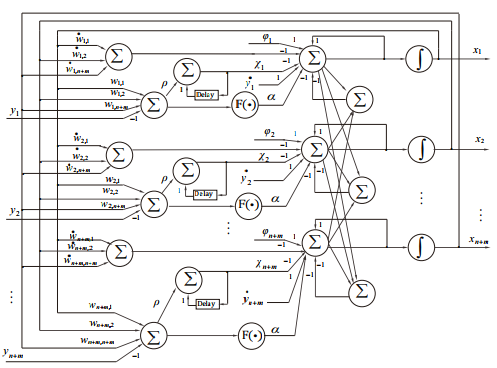
II-A. Neurodynamic Strategies for Redundancy Problems Disturbed by Period Noise
Periodic noise in motion planning problems which may lead to the failure of tracking tasks is rarely considered in previous researches. A novel circadian rhythms neural network (CRNN) and its derivatives are proposed to solve the motion planning problems of redundant manipulators disturbed by the periodic noise from device hardwares or their surroundings. By introducing dynamic compensation term into traditional neurodynamic equation, a continuous-time CRNN model and two discrete-time CRNN (D-CRNN) are proposed, investigated and illustrated. Besides, the 0-stability, convergence and consistency of the proposed models are analysis theoretically and proved strictly.
CRNN models with resistance to period noise are first proposed for dynamic redundancy problems of redundant robots.
Convergence, 0-stability and consistency are proofed in detail to show the excellent property of the proposed models.
Simulation comparisons illustrate the superiority in resistance to random period noise and solving dynamic redundancy system.
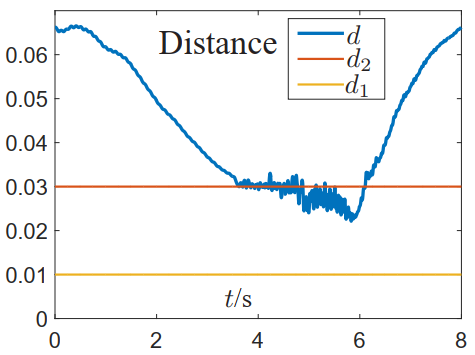
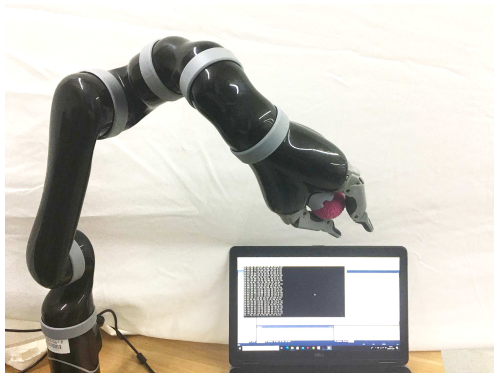
A hybrid torque and velocity optimization (HTVO) scheme is presented and finally used to verify the performance of the proposed model. In order to improve the tracking accuracy, a position feedback is integrated into the HTVO scheme.
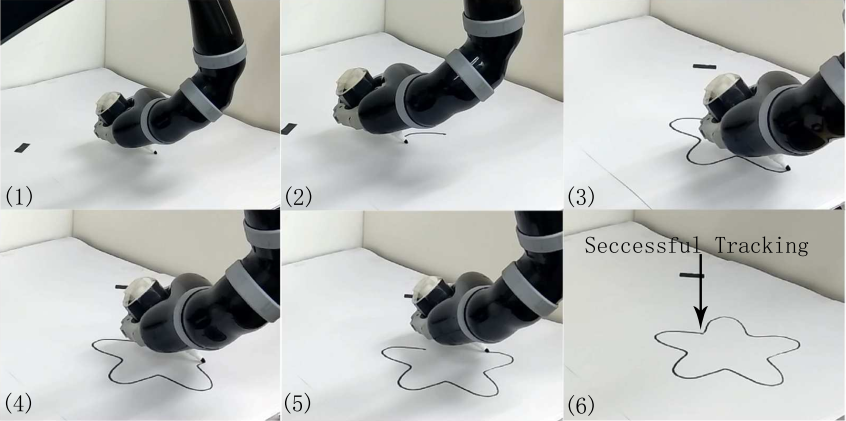
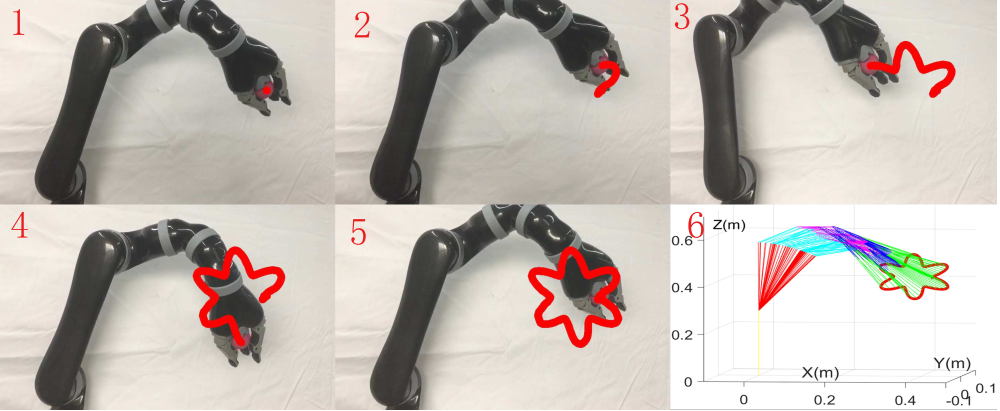
On the physical redundant robot control system consist of a Kinova Jaco2 robot and a computer, the proposed models and traditional models are used to obtain the optimal solution to tracking a desired end-effector path.
II-B. Neurodynamic Strategy for Dynamic Matrix Moore-Penrose Inverse with Excellent Robustness and Finite-time Convergence
As a general form of matrix inverse, dynamic Moore-Penrose (MP) inverse solving has received more and more attention owing to its broad applications in various fields. Many research were focused on static MP inverse solving while most are dynamic in application. For the dynamic MP inverse, the approaches based on neural networks have become a popular solution. However, existing neural models either only achieve infinite time instead of finite-time convergence, or are sensitive to noises. Therefore, finite-time convergent neural model, which is simultaneously capable of addressing the noises, is desperately needed for dynamic MP inverse solving. To do that, the modified ZNN models (MZNN) is proposed and analyzed for the dynamic MP inversion of full-rank matrices. The feasibility, extraordinary efficacy, and superiority of the proposed MZNN models for dynamic MP inverse solving are corroborated by both theoretical results and simulation observations.
This work focuses on the dynamic matrix MP inversion instead of quadratic minimization and other matrix-related problems.
Two MZNN models are proposed for solving dynamic matrix MP inverse, which have desired finite-time convergence and good antinoise performance.
The design idea, procedure and proofs are presented in detail. The network structure diagram of the models is provided for possible hardware implementation.
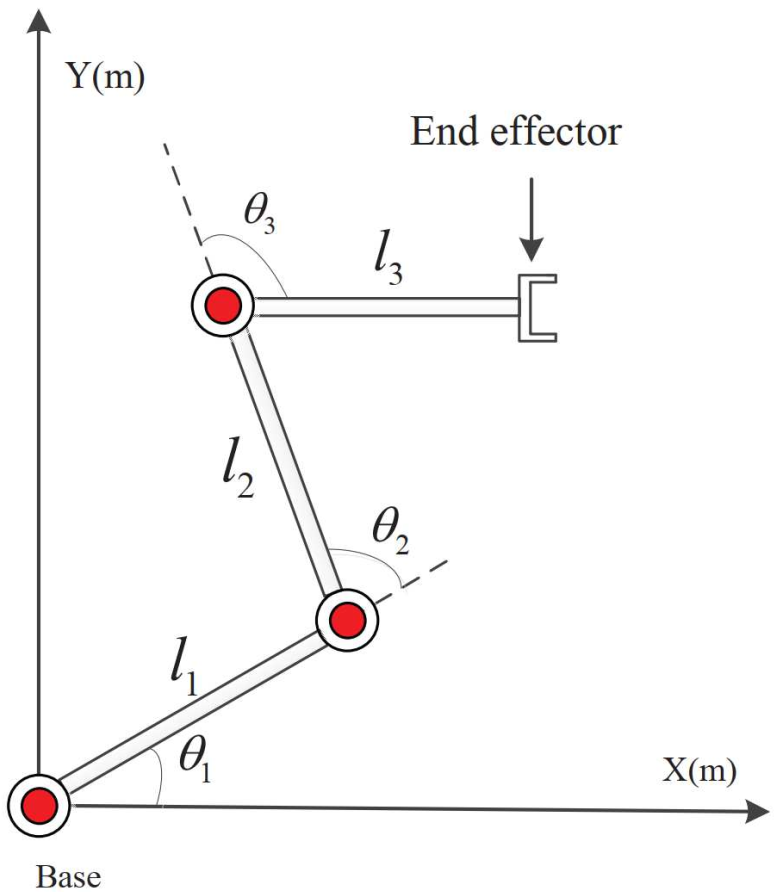
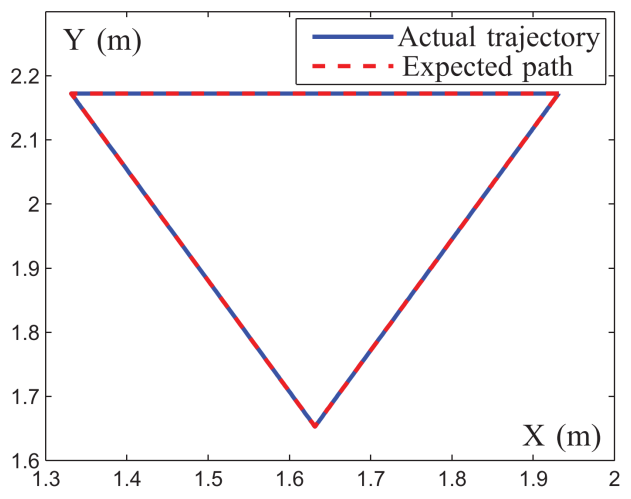
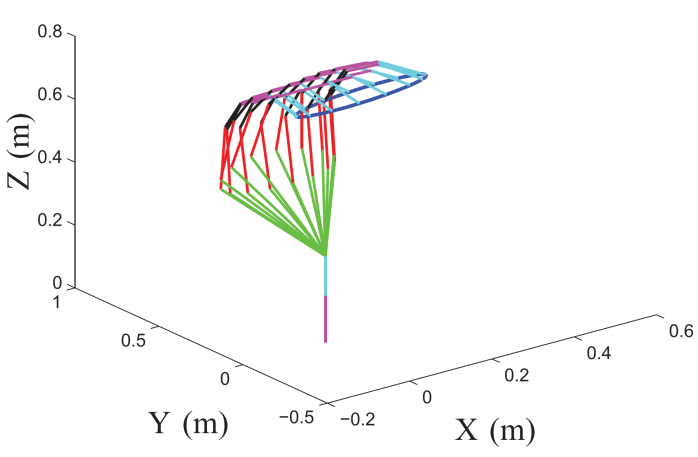
The proposed neural models are successfully used to solve the robotic redundancy resolutions of 2-D planar three-link robot and 3-D Kinova Jaco2 robot.
II-C. Neurodynamic Strategy for Time-varying Matrix Inverse Problems
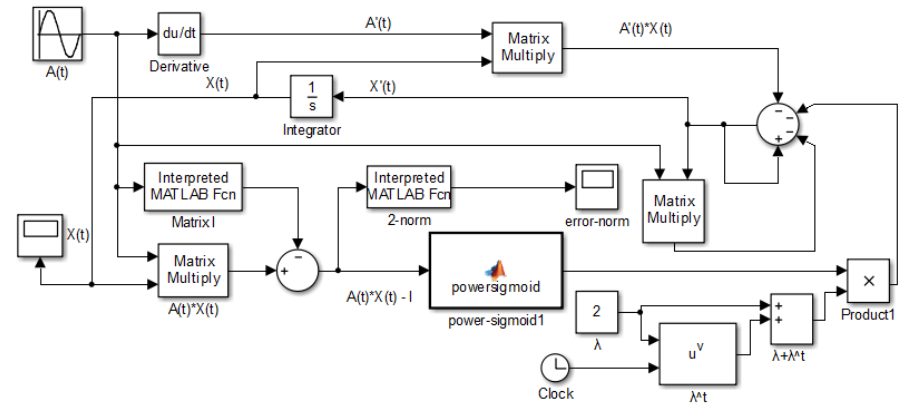
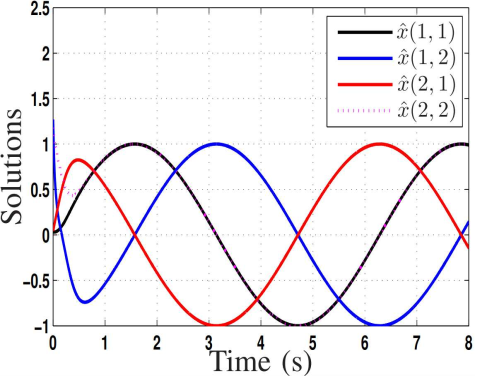
The problem of solving the online time-varying square matrix inverse appears in many fields, such as robotics, air vehicle control, signal processing and so on. In mathematics, it can be simplified as A(t)x(t)=I, where both of coefficient matrix A(t) and unit matrix I are known; matrix x(t) is the unknown variable, which needs to be computed. To solve such kind of time-varying problem, neural networks are preferred because of its parallel-distributed nature and convenience of hardware implementation.
In the past few years, recurrent neural networks have been proposed to solve such a linear time-varying matrix inverse problem. For instance, a gradient-based neural network (GNN) was proposed to solve the time-varying matrix inverse problem. In recent years, a kind of fixed-parameter recurrent neural networks, i.e., Zeroing neural networks (ZNN) has been proposed, and it showed more efficient to solve time-varying problems. During solving matrix inverse problems, ZNN has exponential convergence performance, which makes the computation values quickly converge to the theoretical values. In order to obtain faster convergent performance, a novel varying-parameter convergent differential neural network (VP-CDNN) is proposed.
To deal with time-varying equations, VP-CDNN is proposed, modeled and analyzed. It is designed by a matrix-valued error function and the design parameter is time-varying, which enables the VP-CDNN to have good convergence and robustness. For illustration and for comparison, a scalar-valued error function-based recurrent neural network, i.e., gradient-based neural network (GNN), is presented and developed. Matlab Simulink of both the VP-CDNN and GNN for solving online time-varying matrix inverse is constructed and the results verify the effectiveness and robustness of the proposed VP-CDNN.
Publications
Z. Zhang (PI), S. Chen, et. al., "A Circadian Rhythms Neural Network for Solving Redundant Robot Manipulators Tracking Problem Perturbed by Periodic Noise," IEEE/ASME Transactions on Mechatronics, 2021 (JCR:Q1, IF: 5.303) (PDF |
Google)
Z. Zhang (PI), S. Chen, et. al., "Discrete-Time Circadian Rhythms Neural Network for Perturbed Redundant Robot Manipulators Tracking Problem with Periodic Noises," IEEE Transactions on Industrial Informatics, 2020 (JCR:Q1, IF: 10.215) (PDF |
Google)
Z. Zhang (PI), S. Chen, et. al., "Taylor Discrete Circadian Rhythms Neural Network for Resolving Bi-Criteria Optimization Problem of Redundant Robot Manipulators Perturbed by Periodic Noises," IEEE Transactions on Industrial Informatics, 2021 (JCR:Q1, IF: 10.215) (PDF |
Google)
Z. Tan, L. Xiao, S. Chen, et. al., "Noise-Tolerant and Finite-Time Convergent ZNN Models for Dynamic Matrix Moore-Penrose Inversion," IEEE Transactions on Industrial Informatics, 2019 (JCR:Q1, IF: 10.215) (PDF |
Google)
Z. Zhang (PI), S. Chen, et. al., "Matlab Simulink of Varying-Parameter Convergent-Differential Neural-Network for Solving Online Time-Varying Matrix Inverse," 2016 9th International Symposium on Computational Intelligence and Design (ISCID), 2016 (PDF |
Google)
Z. Zhang (PI), M. He and S. Chen, A Runge-Kutta Type Periodic Rhythm Neural Network for Resistance to Periodic Noise(一种能抵抗周期噪声的龙格库塔型周期节律神经网络方法),Invention Patent, Authorization Number: CN110000780B,
(Web)
Z. Zhang (PI), J. Liang and S. Chen, A Repetitive Motion Planning Method for Redundant Manipulators with Periodic Noise Suppression(一种抑制周期噪声的冗余度机械臂重复运动规划方法),Invention Patent, Authorization Number: CN109129486B,
(Web)
III. Other projects
III-A. An Intention-driven Semi-autonomous Intelligent Robotic System for Drinking, Jan 2015 - Dec 2018
Principal Leader, Key Technology and Application of BCI Lab (Key Laboratory) | Advisor: Prof. Zhijun Zhang
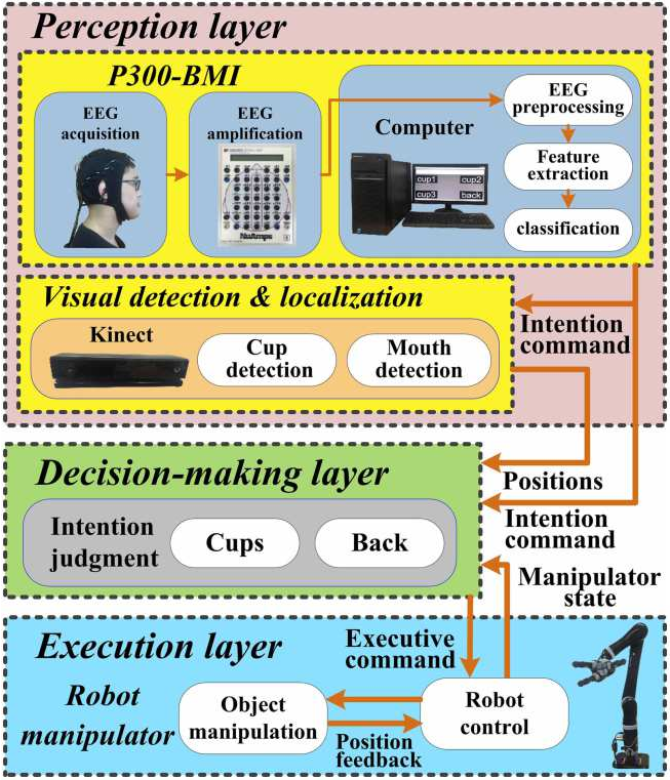
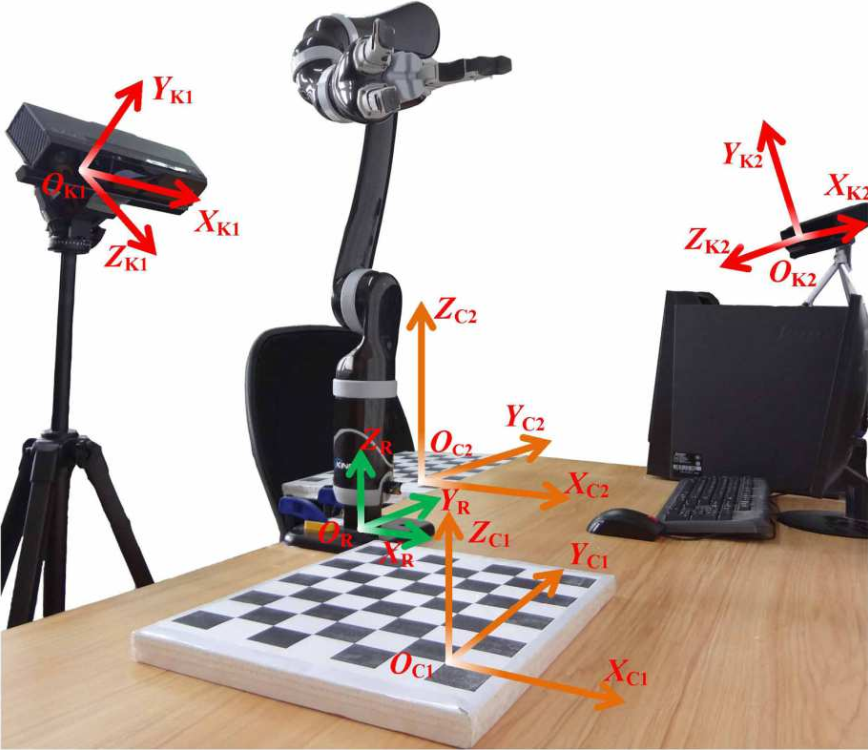
An intention-driven semi-autonomous intelligent robotic (ID-SIR) system is designed and developed to assist the severely disabled patients. The system mainly consists of a non-invasive brain-machine interface (BMI) subsystem, a robot manipulator and a visual detection and localization subsystem. The patient is only required to send one intention command for one drinking task and the robot would finish the rest of specific controlling tasks. The mean accuracy was 97.5%. The main contributions are summarized as follows.
Designed a intention-driven intelligent robotic system including a electric wheelchair and a redundant robot arm for the disable.
An ID-SIR system is a non-invasion type mind controlled robot designed to assist disabled users for drinking.
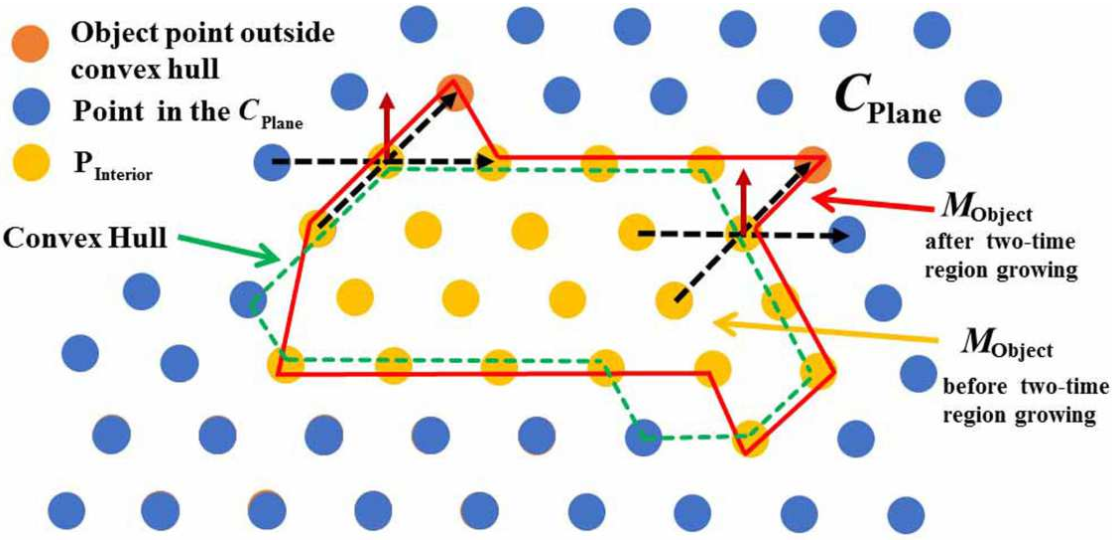
A depth camera-based visual detection and localization method is employed for desired beverage container and the user's month.
A self-adaptive Bayesian linear discriminant analysis algorithm is applied to decrease the cost of recognition time.
Published 1 paper, and obtained 1 China invention patent.
III-B. An Intention-driven Wheelchair for People with Disable, Jan 2015 - Dec 2018
Principal Leader, Key Technology and Application of BCI Lab (Key Laboratory) | Advisor: Prof. Zhijun Zhang
To help people who can not use their arms or legs well, an intention-drive wheelchair equipped with cameraes and a robot arm was designed, assembled and investigated. With the consideration of mental enduring capacity of the disable, a corresponding semi-automatic control algorithm was developed and employed. The main contributions are summarized as follows.
Designed a efficient control strategy for the intelligent robotics system to help the disable to accomplish simple operation by electroencephalogram (EEG) with low mental workload.
With the help of the semi-automatic property, only simple orders are required to given to control the movement and grab.
Controlled by user's EEG signal, the system is able to go where he want to go, and grab the target object.
There is a camera equipped on the front of the wheelchair and toward to the user's face, which offer great flexibility to update command input mode for different users, such as eye tracking, facial expression recognition, head movement and so on.
IV. Six-Rotor Unmanned Aerial Vehicle, Jan 2015 - Jan 2018
Principal Leader, Bionic Intelligent Robot (BIR) Lab | Advisor: Prof. Zhijun Zhang
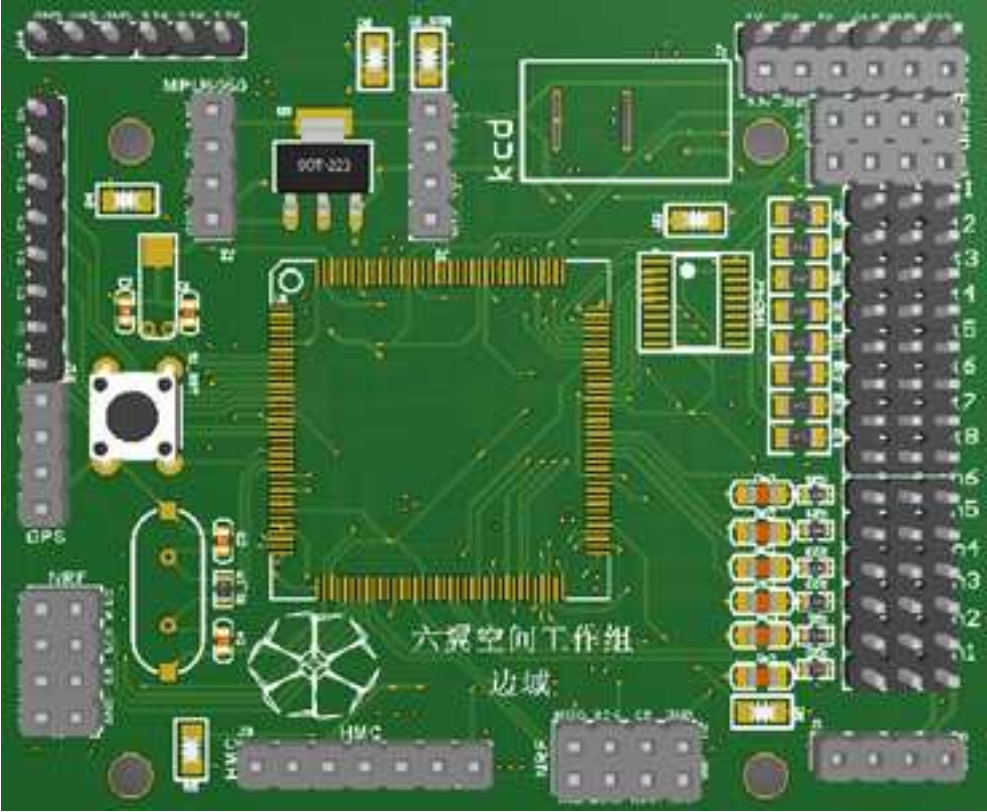
Out of interest in flying robots, I, as team leader, formed a working group with other two undergraduate students to design and develop a six-rotor unmanned aerial vehicle with the support of the Boeing Club. In order to achieve the steady flight of the aerial vehicle, several status sensors and a PID control algorithm with double closed loop are equipped. In addition to the command transmit form the remote controller to the aerial vehicle, the online status of the aerial vehicle are sent to the control interface on the personal computer by the bluetooth module. The main contributions are summarized as follows.
Designed and developed a novel aerial vehicle system with six rotors through distributing sensors, programming control algorithms, and designing hardware circuits, mechanical structures and host software.
Obtained 1 China invention patent.
V. Wheeled Self-balancing Racing Robots, Jan 2014 - Jan 2016
Principal Leader, Intelligent Car Club of SCUT | Advisor: Prof. An Chen
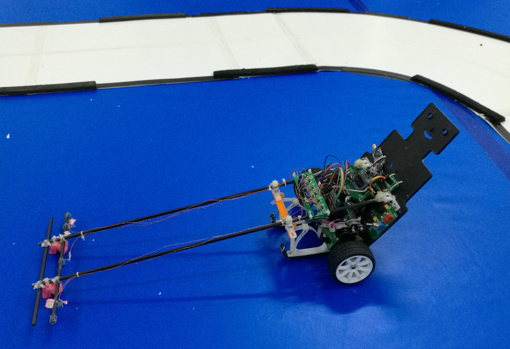
Through the intramural tryouts, I participated in the 10th and 11th smart car competitions as principle leader in my sophomore and junior year. Subject to the competition rules, multi sensors are used on the designed robot and combined to maintain its balance, including gyroscope, accelerometer, encoder and so on.
Designed two wheeled self-balancing racing robots equipped with multi sense. The optical sensor and electromagnetic sensor are employed to identify the track in two smart car competitions respectively.
Obtained excellence award and the second prize of respectively the 10th and the 11th national university students ``NXP'' cup intelligent car competition of Guangdong province.
Publications
Z. Zhang (PI), Y. Huang, S. Chen, et. al., "An Intention-Driven Semi-Autonomous Intelligent Robotic System for Drinking," Frontiers in Neurorobotics, 2017 (JCR:Q2, IF: 2.650) (PDF |
Google)
Z. Zhang (PI), L. Zheng and S. Chen, A Robotic Fly(一种飞行机器人),Utility Model Patent, Authorization Number: CN205891228U,
(Web)
IV. Some Other Robot Systems of Our Bionic Intelligent Robot (BIR) Lab
There are some intelligent systems researched in our lab.
Publications
Siyuan Chen has published 13 SCI papers and 1 EI paper, including many well-known journals in robots, neural network, and optimal control, such as, IEEE-ASME Trans. Mechatron., IEEE Trans. Ind. Inform., IEEE Trans. Control Syst. Technol., IEEE Trans. Ind. Electron. and IEEE Trans. Syst. Man Cybern. -Syst. (Google: Citation: 203; H-Index: 7; I10-Index: 6.)
Journal Papers:
A Circadian Rhythms Neural Network for Solving Redundant Robot Manipulators Tracking Problem Perturbed by Periodic Noise
Z. Zhang (PI), S. Chen, et. al. IEEE/ASME Transactions on Mechatronics, 2021 (JCR:Q1, IF: 5.303) |
PDF |
Google
Discrete-Time Circadian Rhythms Neural Network for Perturbed Redundant Robot Manipulators Tracking Problem with Periodic Noises
Z. Zhang (PI), S. Chen, et. al. IEEE Transactions on Industrial Informatics, 2020 (JCR:Q1, IF: 10.215) |
PDF |
Google
Taylor Discrete Circadian Rhythms Neural Network for Resolving Bi-Criteria Optimization Problem of Redundant Robot Manipulators Perturbed by Periodic Noises
Z. Zhang (PI), S. Chen, et. al. IEEE Transactions on Industrial Informatics, 2021 (JCR:Q1, IF: 10.215) |
PDF |
Google
Two Hybrid Multiobjective Motion Planning Schemes Synthesized by Recurrent Neural Networks for Wheeled Mobile Robot Manipulators
Z. Zhang (PI), S. Chen, et. al. IEEE Transactions on Systems, Man, And Cybernetics: Systems, 2021 (JCR:Q1, IF: 13.451) |
PDF |
Google
Compatible Convex-Nonconvex Constrained QP-Based Dual Neural Networks for Motion Planning of Redundant Robot Manipulators
Z. Zhang (PI), S. Chen, et. al. IEEE Transactions on Control Systems Technology, 2019 (JCR:Q1, IF: 5.485) |
PDF |
Google
Two Hybrid End-Effector Posture-Maintaining and Obstacle-Limits Avoidance Schemes for Redundant Robot Manipulators
Z. Zhang (PI), S. Chen, et. al. IEEE Transactions on Industrial Informatics, 2019 (JCR:Q1, IF: 10.215) |
PDF |
Google
Adaptive projection neural network for kinematic control of redundant manipulators with unknown physical parameters
Y. Zhang, S. Chen, et. al. IEEE Transactions on Industrial Electronics, 2018 (JCR:Q1, IF: 8.236) |
PDF |
Google
A Vector-Based Constrained Obstacle Avoidance Scheme for Wheeled Mobile Redundant Robot Manipulator
Z. Zhang (PI), S. Yang, S. Chen, et. al. IEEE Transactions on Cognitive and Developmental Systems, 2021 (JCR:Q2, IF: 3.379) |
PDF |
Google
An Intention-Driven Semi-Autonomous Intelligent Robotic System for Drinking
Z. Zhang (PI), Y. Huang, S. Chen, et. al. Frontiers in Neurorobotics, 2017 (JCR:Q2, IF: 2.650) |
PDF |
Google
Noise-Tolerant and Finite-Time Convergent ZNN Models for Dynamic Matrix Moore-Penrose Inversion
Z. Tan, L. Xiao, S. Chen, et. al. IEEE Transactions on Industrial Informatics, 2019 (JCR:Q1, IF: 10.215) |
PDF |
Google
Velocity-Level Tri-Criteria Optimization Scheme for Different Complex Path Tracking of Redundant Manipulators
Z. Jia, S. Chen, et. al. IEEE Access, 2019 (JCR:Q1, IF:3.367) |
PDF |
Google
Tri-Criteria Optimization Motion Planning at Acceleration-Level of Dual Redundant Manipulators
Z. Jia, S. Chen, et. al. Robotica, 2020 (JCR: Q1, IF: 2.088) |
PDF |
Google
Acceleration-Level Multi-Criteria Optimization for Remedying Joint-Angle Drift of Redundant Manipulators on Complex Path Tracking
Z. Jia, X. Qu, S. Chen, et. al. IEEE Access, 2019 (JCR:Q1, IF: 3.367) |
PDF |
Google
Conference Papers:
Matlab Simulink of Varying-Parameter Convergent-Differential Neural-Network for Solving Online Time-Varying Matrix Inverse
Z. Zhang (PI), S. Chen, et. al. 2016 9th International Symposium on Computational Intelligence and Design (ISCID), 2016 |
PDF |
Google
Patents:
Siyuan Chen has obtained 5 China authorized patents, 1 China authorized utility model patent and 1 software registration copyrights.
A Primal-dual Neural Network Method for Robot Motion Planning with Nonlinear Constraints
一种非线性约束的原对偶神经网络机器人动作规划方法
Z. Zhang (PI) and S. Chen Invention Patent, Authorization Number: CN108015766B |
Web
An Extended Solution Set Dual Neural Network for Robot Motion Planning
一种机器人运动规划的拓展解集对偶神经网络解决方法
Z. Zhang (PI) and S. Chen Invention Patent, Authorization Number: CN108015765B |
Web
A Runge-Kutta Type Periodic Rhythm Neural Network for Resistance to Periodic Noise
一种能抵抗周期噪声的龙格库塔型周期节律神经网络方法
Z. Zhang (PI), M. He and S. Chen Invention Patent, Authorization Number: CN110000780B |
Web
A Repetitive Motion Planning Method for Redundant Manipulators with Periodic Noise Suppression
一种抑制周期噪声的冗余度机械臂重复运动规划方法
Z. Zhang (PI), J. Liang and S. Chen Invention Patent, Authorization Number: CN109129486B |
Web
A Repetitive Motion Planning Method for Redundant Manipulator Based on Taylor-type Discrete Periodic Rhythm Neural Network Under Periodic Noise
在周期噪声下基于泰勒型离散周期节律神经网络的冗余度机械臂重复运动规划方法
Z. Zhang (PI), J. Liang and S. Chen Invention Patent, Authorization Number: CN109129487B |
Web
A Robotic Fly
一种飞行机器人
Z. Zhang (PI), L. Zheng and S. Chen Utility Model Patent, Authorization Number: CN205891228U |
Web
A Repetitive Motion Planning Method for Redundant Manipulator Based on Euler Discrete Periodic Rhythm Neural Network
一种基于欧拉型离散周期节律神经网络的冗余度机械臂重复运动规划方法
Z. Zhang (PI), J. Liang and S. Chen Invention Patent, Application Number: CN109086557A |
Web
A Soft Interval Support Vector Machine Classification Method Based on Neural Dynamics
一种基于神经动力学的软间隔支持向量机分类方法
Z. Zhang (PI), J. Lin and S. Chen Invention Patent, Application Number: CN109508735A |
Web
A Moving Obstacle Avoidance Method for Redundant Manipulator based on Quadratic Programming
一种基于二次规划的冗余度机械臂移动障碍物躲避方法
Z. Zhang (PI), M. He and S. Chen Invention Patent, Application Number: CN113276121A |
Web